0228 » History » Revision 11
« Previous |
Revision 11/15
(diff)
| Next »
Quentin Labourey, 2018-03-06 14:09
02/28 : PoM Discussion¶
Participants:
Simon, Andrea, Ellon, Pierre, Quentin
Goal of the meeting: Discuss the new PoM architecture, taking into account the different frames to handle and the way we're going to handle changes in positions in the past
Sum-up¶
First, we have to keep a transform tree up to date. The tree used here is represented below:
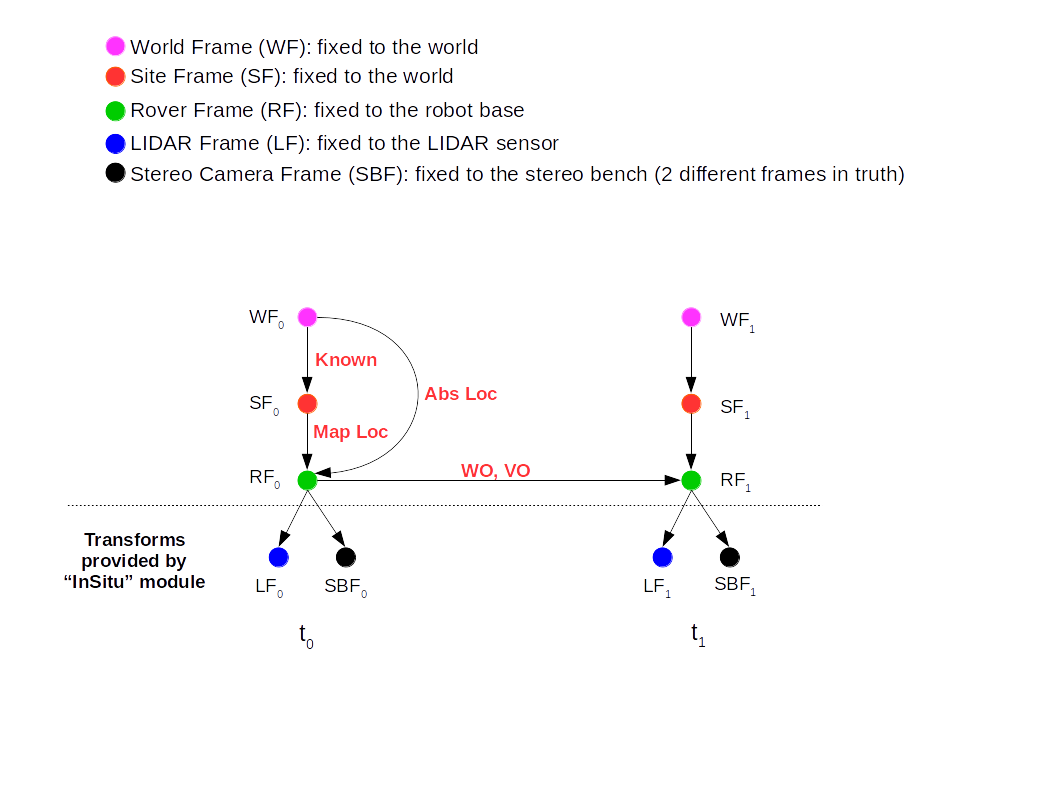
The frames are the nodes of the graph, and the DFPCs that change them are visible in red. Some DFPCs give a transformation between the same frame at two successive times (WO for wheel Odometry, and VO for visual Odometry) while some DFPCs give the transform between two frames at a given time.
The way we proposed to do it is to index the poses on the highest frequency localization DFPC (Wheel Odometry on principle), and timestamp each observation made by any sensor in order to keep track of the poses we need to memorize. Below is a small example in time commented:
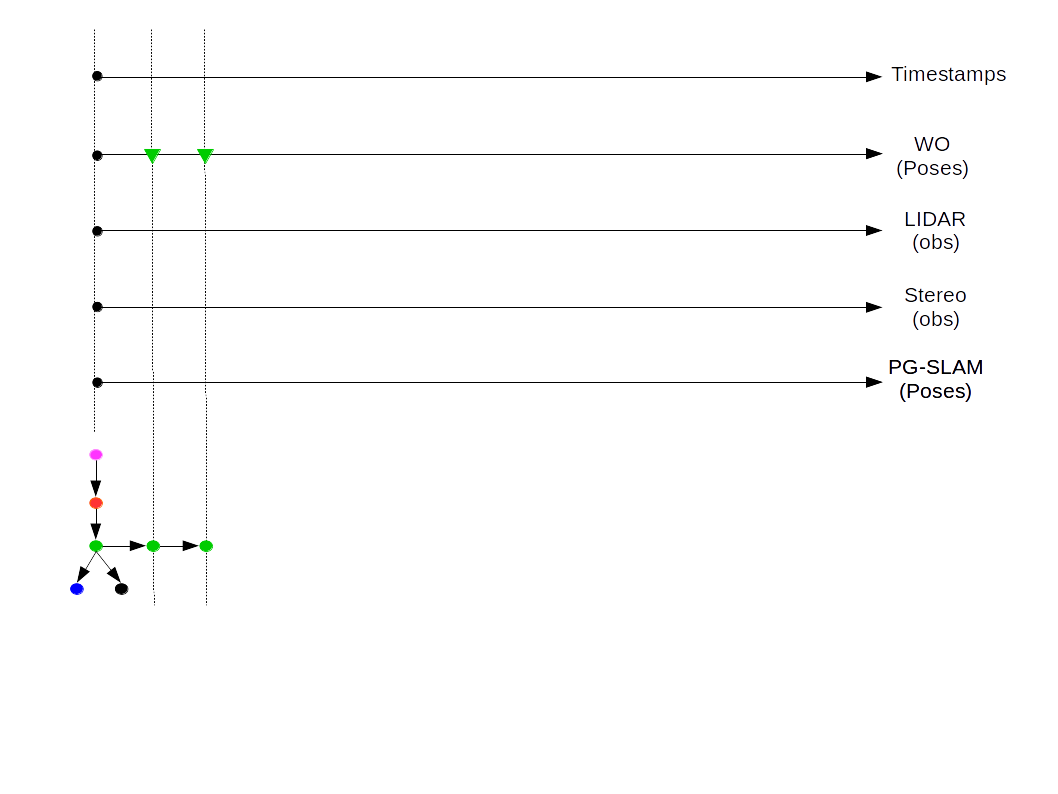
As we begin, no observations are made, only poses coming from the Wheel Odometry, which are added to the graph.
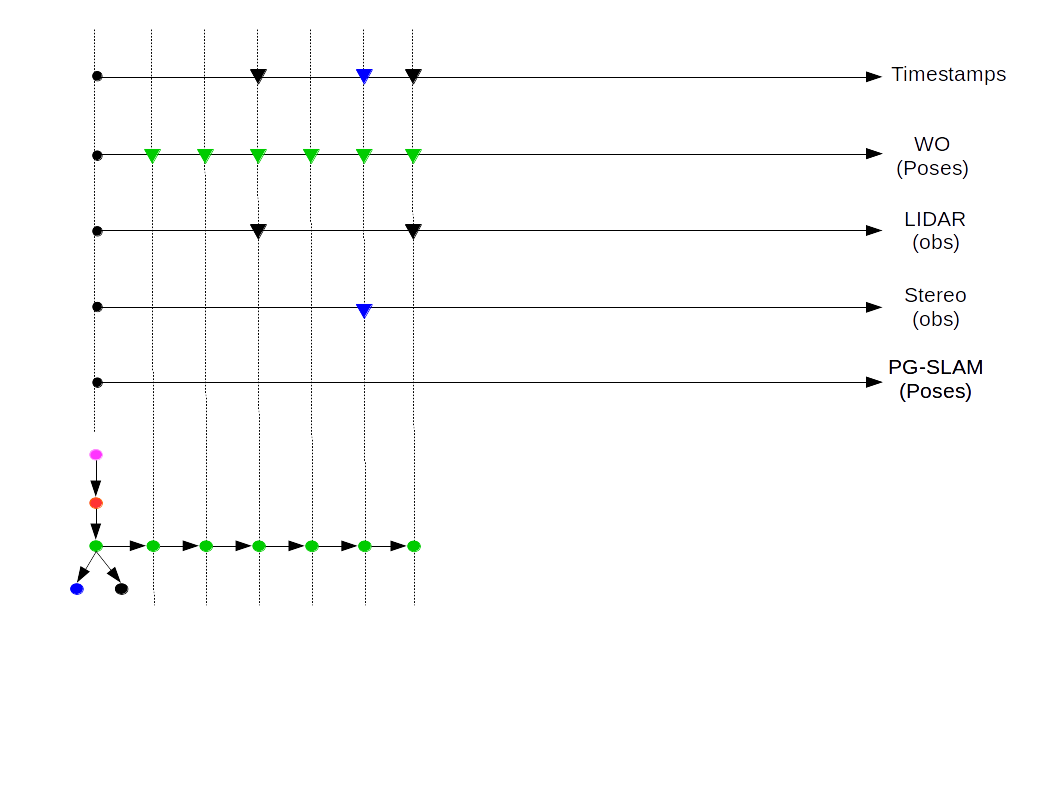
Observations are provided by both sensors, and each time an observation is produced, a timestamp is made, to memorize the available pose at that time (coming from WO, because no other source has produced a pose at the moment).
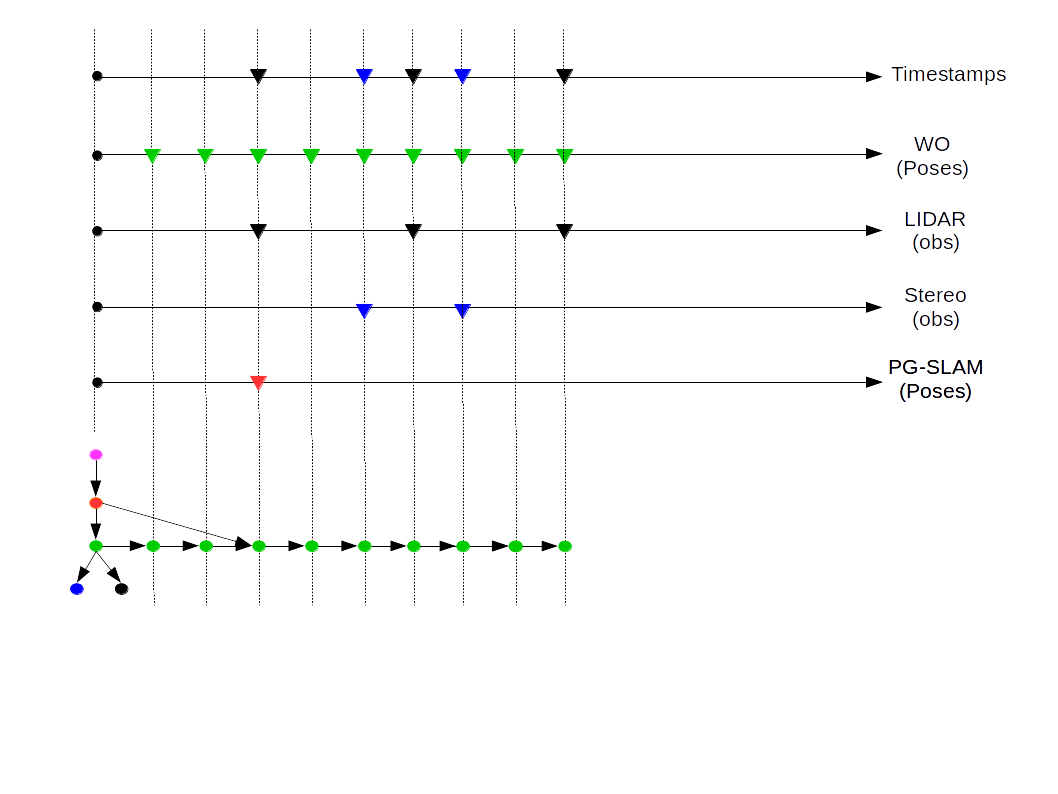
After a while, a pose in the past is given by PG SLAM. A corresponding Edge is added to the graph. The changes can then be propagated to the rest of the poses, i.e. the future.

Updated by Quentin Labourey almost 7 years ago · 15 revisions