0309 » History » Revision 23
« Previous |
Revision 23/27
(diff)
| Next »
Pierre Narvor, 2018-03-09 17:44
03/09 : PoM/Prism Discussion¶
Participants :
Simon, Ellon, Quentin, Pierre
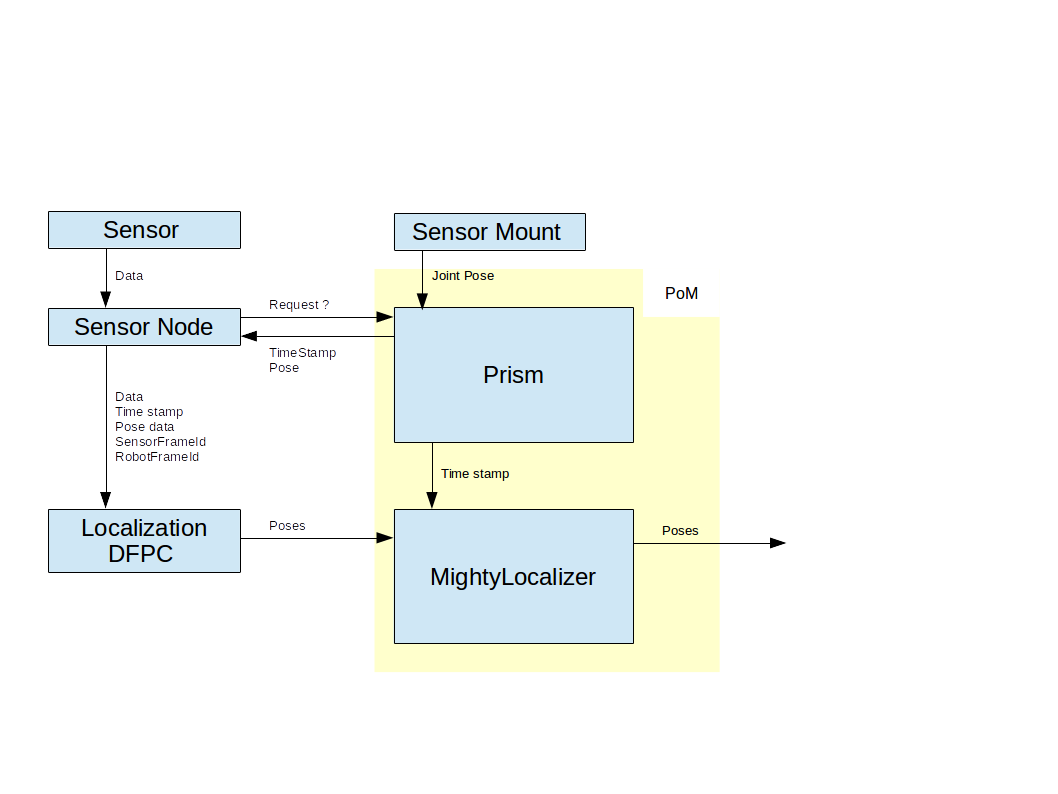
Goal of the meeting : Discuss the PoM/Prism architecture (previously InSitu). Prism is the sub-task of PoM which handle the internal transform tree of a robot (RobotBaseFrame to SensorFrame(s)).
Note : PoM is divided in two part : Prism which handles the pose of sensors relative to the robot and (name undefined, default = MightyLocalizer) MightyLocalizer which handles the pose of the robot frame relative to the World Frame. The meeting is only about Prism.
Features of Prism¶
- Load and maintain the RobotBaseFrame to SensorFrame(s) tree of the robot up to date : URDF configuration file for initialization. Is a client of moving sensor mounts (arms, platforms...) to update internal transform tree. No memory. Handles transform uncertainty.
- Sensor pose service : A sensor acquiring data must ask Prism for a time stamp and a sensor pose(= current transform RobotBaseFrame to SensorFrame + uncertainty). The pose and the time are stored by the sensor node alongside the sensor data (this pose will be of use only with this data. Hence no memory is needed in Prism).
- Send time stamp to mighty-localizer for saving
Details¶
Loading and maintaining internal tree¶
- Internal Tree : all SensorFrames connected to a single RobotBaseFrame through one or several edges. Two types of edges : fixed or moving.

- Initialization : Internal tree building form URDF file. Default values for moving edges to define ?
- Maintaining the tree : Prism receives poses form all moving sensor mounts. Movable edges in the internal tree are updated right away (no memory). To define : communication between joints and Prism (identification of joints etc...).
Sensor pose service¶
Acquired sensor data has be associated with a pose of the sensor and a time stamp.
The SensorFrame to RobotBaseFrame transform (furnished by Prism) is measured at the time of the acquisition and will NOT be modified later. Hence, no memory is needed in Prism and the SensorFrame to RobotFrame transform is recorded alongside the data outside of Prism. (the RobotBaseFrame to WorldFrame recorded at the time of acquisition will however be modified later by MightyLocalizer).
- Content of a data structure : The data is published in a structure alongside the time stamp and pose at the acquisition, and two FrameId (SensorFrameId and RobotBaseFrameId).
- Workflow :
1) Data acquisition by sensor
2) Sensor node asks Prism for a time stamp and a pose
3) Sensor node publish a complete data struct
Send time stamp to mighty-localizer for saving¶
The time stamp at time of acquisition must be saved by MightyLocalizer for the case where a localization DFPC needs the RobotBaseFrame to WorldFrame pose at time of data acquisition.

Updated by Pierre Narvor almost 7 years ago · 27 revisions