0404 » History » Revision 6
« Previous |
Revision 6/13
(diff)
| Next »
Quentin Labourey, 2018-04-04 16:01
04/04¶
Participants:- From MAG: Vincent, Fabrice, Clément, Raphaël
- From LAAS: Pierre, Ellon, Quentin
- Integrate MAG Stereovision with LAAS DEM building
- Discuss Metadata addition to ASN.1 message
- Participate to the monthly progress teleconference
Integrate MAG Stereovision with LAAS DEM building¶
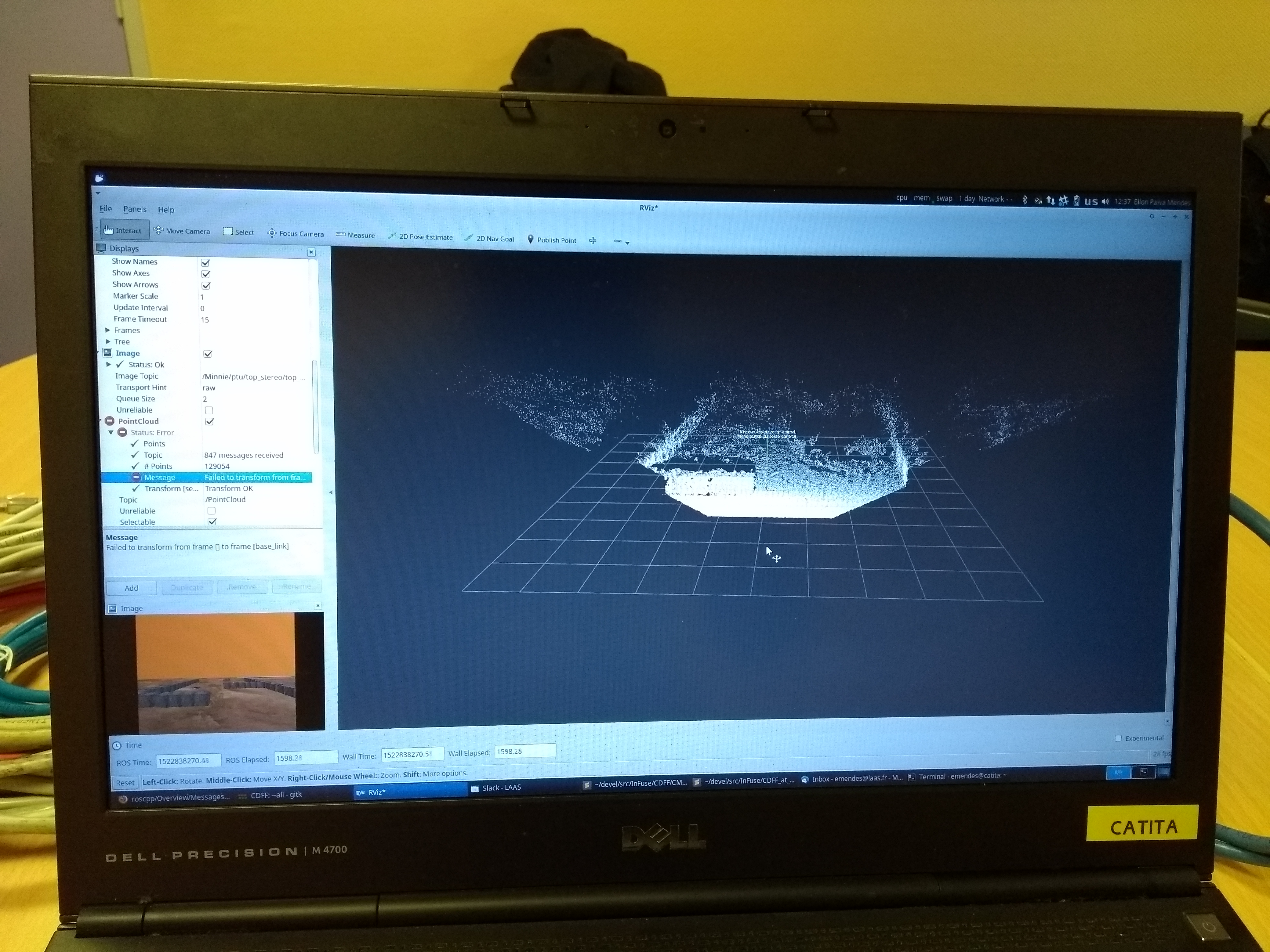
It took quite a while for MAG to be able to transfer Point clouds through the network: they had a problem with their docker and the way it was communicating with the world. They were able to provide an working point cloud and we could visualize it on Rviz thanks to Ellon's visualizer:
After some decoding problems, we could also produce a DEM and visualize it, but the data obtained did not make a lot of sense (pointclouds appearing in several unrelated places on the map while the robot was not moving). We did not have time to investigate the problem further to know if it came from the structure sent (pose attached) or from the DEM building algorithm.
Discuss Metadata addition to ASN.1 message¶
The discussion mainly
Updated by Quentin Labourey almost 7 years ago · 13 revisions