Actions
Modules description and installation » History » Revision 5
« Previous |
Revision 5/6
(diff)
| Next »
Kévin Desormeaux, 2021-06-15 11:36
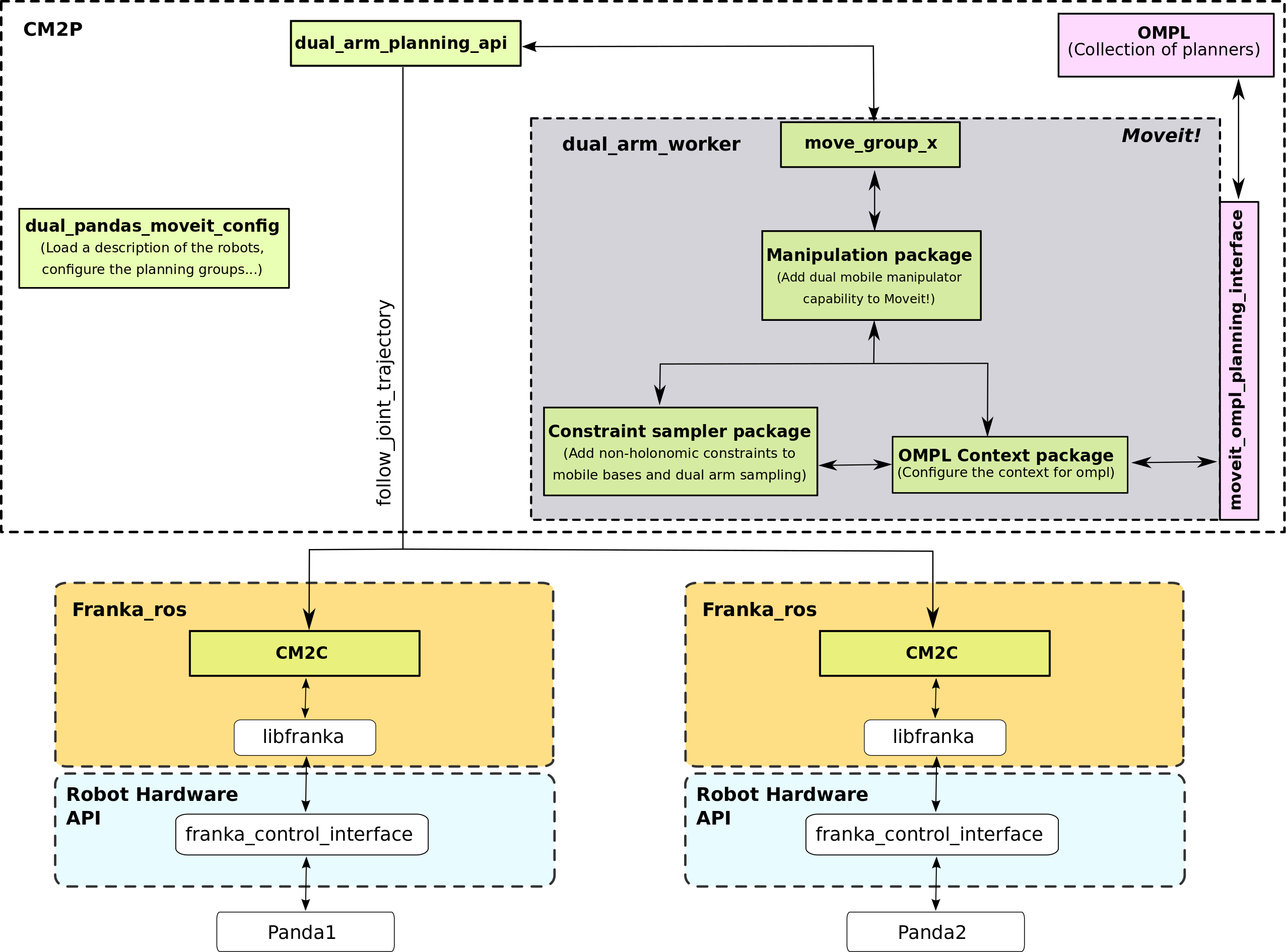
Modules description and installation¶
Overall view¶
The whole architecture has been implemented under ubuntu 18.04 and on the ROS melodic version. It has to be noted that CM2P also possesses a branch for ROS kinetic.
Ideally you should split the software on 3 different machines. At the moment one instance of CM2C is installed on the kukarm workstation to control the panda1.
Another is installed on truyere for panda2. The planning stack (CM2P) is installed on a laptop.
Updated by Kévin Desormeaux over 3 years ago · 6 revisions