Cooperation Manipulation Control » History » Revision 3
« Previous |
Revision 3/11
(diff)
| Next »
Kévin Desormeaux, 2021-06-15 12:06
Cooperation Manipulation Control¶
Franka_ros¶

To operate the pandas it is necessary to have real-time kernels on the machines running the control stacks. It is the case with the kukarm and truyere workstation.
You should have ROS (melodic version ideally) installed. You will need to also to install franka_ros and libfranka .
sudo apt-get install ros-melodic-franka-ros sudo apt-get install ros-melodic-libfranka
You are strongly advised to read the franka documentation to begin with. See https://redmine.laas.fr/projects/dual_arm_exp/wiki/Franka_documentation_and_operating_the_Pandas and https://frankaemika.github.io/docs/franka_ros.html.
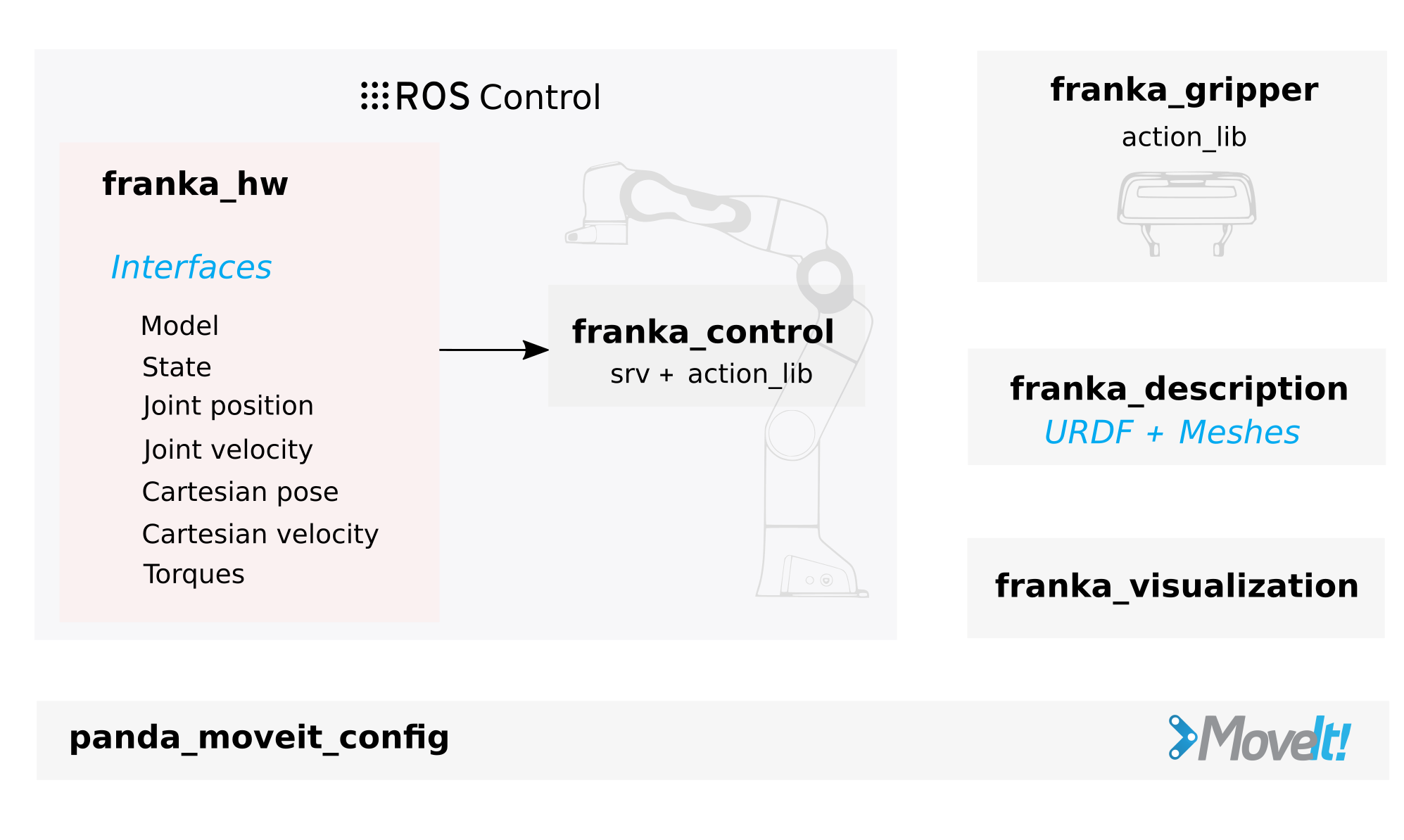
Basically franka_ros is a collection of package integrating libfranka into ros_control. There is packages for hardware abstraction, to control the grippers, for robots description etc.
Important : libfranka must have the same versions running on the workstations (kukarm, truyere etc) and on the panda controllers (FCI). Otherwise there will be compatibility issues.
CM2C¶
Once franka_ros is installed you can create a catkin workspace in your home directory to install CM2C. See http://wiki.ros.org/catkin/Tutorials/create_a_workspace.
CM2C is available here on the mp2_ros repository:
Updated by Kévin Desormeaux over 3 years ago · 11 revisions