Projects
- Aerial Robotics Testbed
Aerial Robotics Testbed
- fracio
A tool to generate diagrams from Fiacre source files.
- HAZOP-UML
Hazard analysis technique mixing the risk analysis technique HAZOP (Hazard Operability), and the system description language UML (Unified Modelling Language)
- LaTeX-LAAS
Thèmes, styles ou autres outils LAAS pour produire des documents LaTeX.
- LoPy-synchronization
This project provides MicroPython implementations of synchronized MAC access schemes over LoRa for the Pycom LoPy boards, specifically the LoRaWAN class B and a novel class S.
- mirage
Mirage is a powerful and modular framework dedicated to the security analysis of wireless communications.
WARNING: this repository is outdated. The project is still active and can be found on GitHub: https://github.com/RCayre/mirage
- btlejack-custom-firmware
This repository contains a custom version of btlejack firmware that can be used by Mirage in order to sniff and jam advertisements. It's a fork from https://github.com/virtualabs/btlejack-firmware/.
- mirage-documentation
Documentation of Mirage
- mirage-irma-device
This project includes some useful resources in order to build an IRma hardware.
IRma allows to easily sniff and inject raw Infrared Radiations signals.
- move3d
move3d fork for testing pull-request based software dev. mgmt. in RIS team by few interested PhD students.
This test may end up by applying this mgmt to the whole dev. of move3d.- move3d_facts
ROS node computing geometric facts based on libmove3d
- move4d
Fork of move3d with lots of changes
- no more libmove3d-hri
- support for different kind of trajectories
- plugin based
- python bindings
- GTP
- ...
- OwnTech
OwnTech - Technology worth sharing¶
The OwnTech project is dedicated to create an Open-Source technological suit for creating low-cost, reliable and smart decentralized micro-grids. From power electronics to micro-grid expansion simulators, each contribution from OwnTech is structures in open-source sub-projects....
- OwnFlow
OwnFlow - Let your grid flow
This project couples the use of multiple load-flow and a cash-flow simulation to give its user a tool to plan micro-grid expansion through a scenario-based analysis.
- OwnPower
Open-Source multi-purpose power electronics converters
- single-phase
A single-phase power board project, containing hardware, firmware and software for this power electronics module.
- redmine@laas
Redmine installation at LAAS.
- global_permissions
global_permissions implements global permission inheritances for top-level projects that select the "inherit members" flag.
- redmine_git_hosting
This is a fork of https://github.com/jbox-web/redmine_git_hosting with some useless features removed and local tweaks implementing missing or incomplete ones.
- redmine_gollum
This is a fork of https://github.com/gugod/redmine-gollum which adds integration with redmine_git_hosting and few other fancy features (searchable wikis, user friendly editor ...)
- redmine_ldap_sync
Local fork of https://github.com/tainewoo/redmine_ldap_sync with some laas fix/cutomizations.
- redmine_theme_changer
Local fork of https://github.com/haru/redmine_theme_changer with some laas fix/customizations.
- ArpAgeFilter
Utilisation d'arpwatch et ldap pour detecter les trop vielles machines encore déclarées
- owncloud
customisations de OwnCloud au LAAS
- vnc4mybrowser
Shell wrapper to start/stop/monitor VNC and noVNC(web) servers.
- wifi-laas
script de configuration profils wifi pour le LAAS et Eduroam @ LAAS
- TAF
The code available in this repository is a prototype of a tool to generate test environment. Note that the tool is still under development.
- upsmon
Infrastructure de monitoring appliquée aux onduleurs.
-
- teensyshot
DSHOT communication with ESC using Teensy 3.5 or Teensy 4.0 development boards.
Forked from https://github.com/jacqu/teensyshot to implement tk3 communication protocol for compatibility with telekyb3
- dynamixel
This project hosts some works related to the Dynamixel motors made by Gianluca Corsini (gianluca.corsini@laas.fr, corsini.gianluca@gmail.com).
See the wiki section for more details about the subprojects....
- dxsim-gazebo
This repository contains a Gazebo plugin that allows simulating a chain of Dynamixel motors connected together to the same serial bus (daisy chain).
It provides the same interface as the real one, i.e. a
ptyport connection you can connect to, and it emulates completely theDynamixel Protocol 2.0.... - libdynamixel
This project hosts some works related to the Dynamixel motors made by Gianluca Corsini (gianluca.corsini@laas.fr | corsini.gianluca@gmail.com).
See the Wiki section for more details about the subprojects....
- matlab
A collection of MATLAB-based and -related software.
- bib
bibliography database
- NMPC for Human Aerial Handover
This project contains the git repository for the IROS2022 paper submission titled Nonlinear Model Predictive Control for Human-Robot Handover with Application to the Aerial Case.
The
REPOSITORYcontains the source code of the controller, and the complementary modules that are not available on git.openrobots.... - Visual and Physical Control Architecture for Flying End-Effector
This project contains the git repository for the AIRPHARO paper submission titled A General Control Architecture for Visual Servoing and Physical Interaction Tasks for Fully-actuated Aerial Vehicles
The repository contains the source code of the controller and the complementary modules (supervisor, camera, aruco detector...)...
- beamer-laas
My (non-official) beamer template following the LAAS-CNRS graphic guidelines.
Credits goes to Guilhem Saurel, as this template is based on the one he built for his thesis defense (https://github.com/nim65s/phd)
- Multi Agent NMPC for Active Information Acquisition
This project containts the git repository for the RAL paper submission titled "Motor-level N-MPC for Cooperative Active Perception in Heterogeneous Multi-agent UAVs"
The repository contains the source code of the controller and the complementary modules (camera, aruco detector...)...
- NMPC for Enforced Vision-Based Localization
This project containts the git repository for the IROS submitted paper titled "Enforcing Vision-Based Localization using Perception Constrained N-MPC for Multi-Rotor Aerial Vehicles".
Preprint and video available at https://hal.laas.fr/hal-03597619v1
... - Perceptive and torque-control NMPC
This project containts the git repository for the RAL paper entitled "Motor and Perception Constrained NMPC for Torque-controlled Generic Aerial Vehicles"
The repository contains the source code of the controller and the complementary modules (camera, aruco detector...)...
- kalman_filter
Kalman filter used in lwrc to estimate position, velocity and acceleration of the arm.
- LibNoWebsocket
native stream sockets between C and HTML5
source:README.md - pfcalcul
admin scripts for slurm+docker on a cluster
- CCC
Cours de Calculabilité, Combinatoire et Complexité
- EvacSimScript Python pour
- 1 Générer des réseaux routiers aléatoires
- 2 Simuler des incendies
- 3 Générer des plans d'évacuation "crédibles"
- 4 Générer des instances du problème d'évacuation dans un format texte pour un modèle CPO
- LaasTemplate
Latex Beamer Template
- PySched
Python library for resource-constrained scheduling with LaTex outputs
- WODES'22
Article pour la conférence WODES 2022
Travaux du stage d'Ibis : diagnostic actif pour la localisation de dérives temporelles -
- ACUMOS Planners
Some code to make regular action planners available in ACUMOS.
- bt2fiacre
Behavior Trees are becoming more and more popular in robotics. Let see what kind of formal V\&V we can consider by translating them to Fiacre, to get TTS and run some model checking, or run the real experiment with Hippo.
See the example directory for examples.... - CT_drone
A GenoM3 module to do some simple image analysis from a drone.
- grab an image in a ROS topic,
- look for some color blob with OpenCV,
- record the position (obtained from POM) in a findings map,
- export the findings map in an OccupancyGrid which is then displayed with the help of tf2-genom3... - CT_robot
Simple project used to illustrate the RAS 2022 paper.
- demo-genom3
The basic demo-genom modules with branches to do some testing without polluting the official branch.
- Drone V&V
This project describes some of the GenoM3 based V&V techniques one can use on the LAAS drone experiment.
- Felix GenoM3 Utils
Macros, and other code utilities I use in various GenoM3 modules.
- Felix IDL
Some IDL types I use in various projects (Osmosis, Minnie)... not present in openrobots-idl...
Some of these types are in fact ROS msgs IDL definitions which can then be masqueraded.
- joystick-maneuver
A small GenoM3 client to control maneuver-genom3 and rotorcraft-genom3 with joytick-genom3...
... this also gives an example of an adhoc genom3 client in C.
- Mikrokopter Visualisation
This GenoM3 module reads the pom state port and display a mikrokopter in a running Morse simulation.
- OSMOSIS
LAAS Code (GenoM3) for the OSMOSIS show case.¶
This project contains all the GenoM3 components needed for the OSMOSIS show case, as well as instructions on how to set it up and run varous V&V tools along/
Check the Documentation tab for more information....
- GPSDriver-genom3
The GPS Driver GenoM3 component.
- IMUDriver-genom3
This is the IMUDriver GenoM3 component of the OSMOSIS show case.
- LaserDriver-genom3
This is the the LaserDriver component (heavily inspired by a Hokuyo laser.
- OpenPRS supervisor
The OpenPRS supervisor for the Osmosis show case.
- PotentialField-genom3
This is the GenoM3 module for the PotentialField component of OSMOSIS
- RobotDriver-genom3
The GenoM3 robot driver (odometry/speed control).
- RWLSensor-genom3
Runway Light Sensor genom3 component.
- SafetyPilot-genom3
This is the SafetyPilot GenoM component of the OSMOSIS show case.
- ProSkill
New project to design a new procedural langage to specify and write acting skills.
The main driver is to enable the synthesis of a Fiacre formal model equivalent to the skills, as to enable V&V, as well as Runtime Verification.
For now, we got started with the SkiNet grammar, and mixed it with some OpenPRS control structure. Hence the heavy code share with OpenPRS to get started.... - RobNav
Project to implement a number of simple GenoM3 modules to "simulate" a navigation loop similar to the one used on Dala/Mana.
The goal is to play with these modules with Fiacre and BIP templates.
- ROS ACUMOS bridge
This small project show how one can bridge ROS and ACUMOS (for H2020 AI4EU and subsequent projects).
It contains a number of small programs to illustrate the different ways this can be done.
Most of the code is from the ROS and gRPC tutorial programs....
- ROSPlan ACUMOS bridge
Small project to study how we can call ROSPlan planners (for now) from ACUMOS components.
- V & V
Just a project place holder for the various V&V templates, tools I work on. Check the subprojects for real code and repository.
- GenoM3 BIP Template
The BIP template for GenoM3. Starting with the version which works with the BIP Engine for both ROS and PocoLibs.
- GenoM3 FIACRE Template
This project holds the current FIACRE GenoM3 template.
Check the Documentation tab of this project.
- GenoM3 UPPAAL Template
This project holds the current UPPAAL GenoM3 template.
- Frédéric Blanc
Fred's projects
- C.A.O conception assistée par ordinateur
INKSCAPE éditeur de graphismes vectoriels libre
KICAD suite logicielle de conception pour l'électronique
FLATCAM conception d'usinage pour les fraiseuses CNC.
CANDLE logiciel de contrôle pour CNC basé sur GRBL
REDMINE_GIT application Web de gestion de projet flexible... - Capteurs Repartis V3.0
Nouvelle génération de capteurs, a base de ESP32 et de protocole MQTT
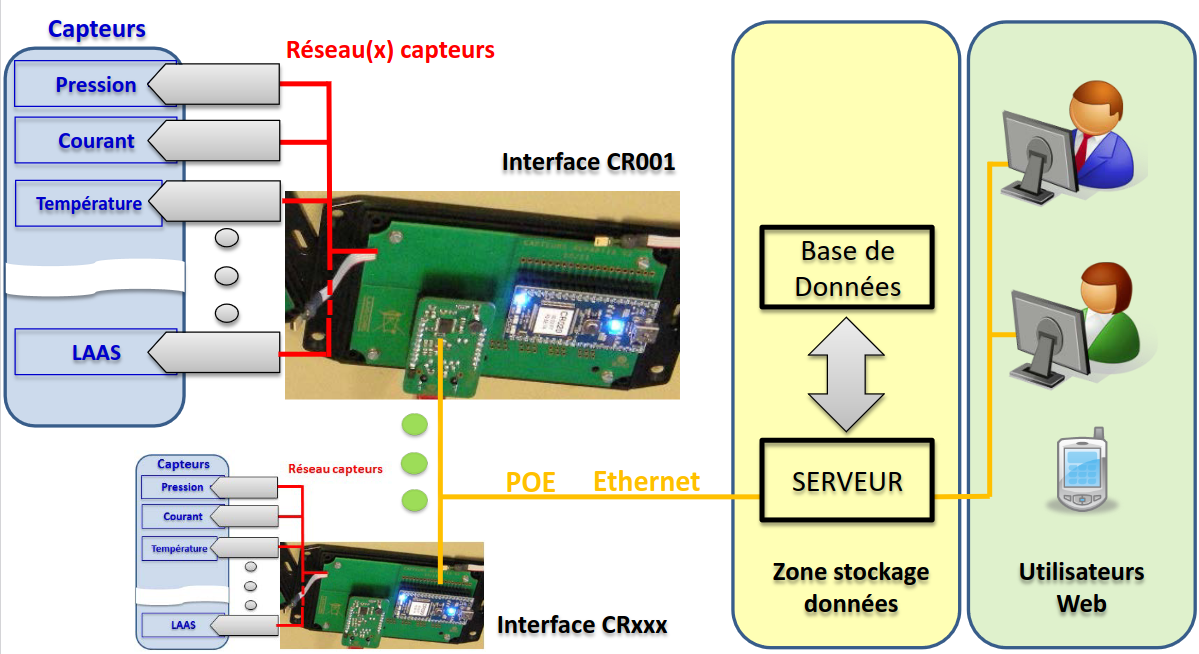
wiki- Code ESP32
code de programmation ESP32
- KICAD PCB ESP32
Carte fille ESP32 compatible avec l’ancienne génération de capteurs repartis LPC1768
- ESP32
SOC (System On a Chip) High Level of Integration Hybrid Wi-Fi & Bluetooth Chip,
Ultra-Low Power Consumption (Hibernatation mode Current consumption:4.5µA).
CPU dual-core 32-bit , up to 600 DMIPS and 520 kB SRAM.
Two SAR ADCs (12bits), with simultaneous sampling and conversion... - Hyperproto_code
Hyperproto est le prototype d'un hyper-spectromètre a base de DLP

wiki - Hyperproto_FPGA
pilotage du demo board DLP4100, pour le prototype d'hyperspectroscope

wiki - Karl_Suss_AP6
station sous pointe Karl Suss AP6
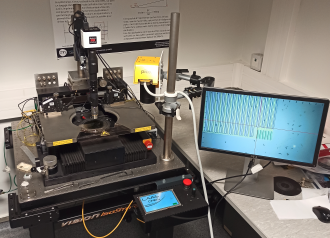
wiki- Karl_Suss_AP6_console
Module KON KSAP6 est la console du testeur sous pointes
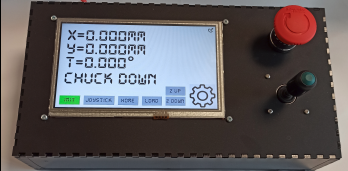
- Kicad PCB KSAP6
Module MKS contrôle moteurs du testeur sous pointes
fichier KICAD 6.0
- LPWAN
LOng RAnge (Wide-Area Network).
the LoRa Community, a premier platform for IoT (Internet of Things) and M2M (machine to machine) technologists, developers, end users, and solution providers.
LoRaWAN is a media access control layer protocol for managing communication.... - MOTOR 1 AXE AccelStepper
Pilotage moteur pas a pas 1 axe avec contrôle de l'accélération
- MOx Metal Oxide semiconductor gas sensors
Metal oxide semiconductor gas sensors are utilised in a variety of different roles and industries. They are relatively inexpensive compared to other sensing technologies, robust, lightweight, long lasting and benefit from high material sensitivity and quick response times. They have been used extensively to measure and monitor trace amounts of environmentally important gases such as carbon monoxide and nitrogen dioxide....
- Red Pitaya
Couteau suisse pour les ingénieurs.
outils de développement:
Vivado -> FPGA
wiki
- Gianluca Corsini Homepage
|{width:500px}.!https://redmine.laas.fr/attachments/download/4654/gcorsini.jpg!|{width:1000px}. Greetings, welcome to my website!
I'm Gianluca Corsini, a passionate roboticist hailing from Misano Adriatico, a nice city in the province of Rimini, Italy.... - m3d-remote-plot
m3d-remote-plot is a tool written in python, using scipy, which serves as a data visualizer for move3d. It communicates with it through TCP/IP sockets, so it can be used remotely.
- icub_fts_wrapper
ROS node to wrap the icub library made by Matthieu.
See: https://git.openrobots.org/projects/icub-libs - sandbox_simple
Example of a single robot (base + arm) manipulating a bar.
Use of closed chain kinematics. - moveit_ompl_planning_interface
Code used with dual_arm_worker version melodic and dual_arm_planning_api.
-
- gbM
Kinematics models for 6 / 7 DoF robotic arms
- lwrc-genom
KUKA LWR4 controller
- lwri-genom
Kuka LWR4 high-level controller.
- Matthieu Herrb
Matthieu's projects
- dinner
Le projet Dining Hackers revisité.
- Impressive!
Fork of Impressive!
- multicast
Test programs for multicast IP
- Présentations
dépots git des talks
- GenoM3-UPPAAL
GenoM3 to UPPAAL and UPPAAL-SMC template
- SemIoTics
Autonomic IoT devices manager connected to a knowledge base and ontologies
-
- Matlab_projects
Various matlab/simulink projects
- aline
JULIA Package for the computation of piecewise linear non necessarily continuous functions to approximate or bound non linear continuous fonctions
-
- LinA
JULIA Package for the computation of piecewise linear non necessarily continuous functions to approximate or bound non linear continuous fonctions
- CAMS
Main repositories of CAMS code
- inFuse
LAAS internal work related to the h2020 InFuse project
Repositories:- infuse_asn1_types
- infuse-asn1-conversions
- infuse-novatel-gps-driver
- infuse-velodyne-genom3
- infuse-pom-base
- infuse-pom-crisp
- infuse-envire
- infuse-crisp-genom3
- infuse-pom-tokamak...
- Absolute Localization
Public Absolute Localization (non-infused version).
- Nephelae
All the work / documents / code developed within the Nephelae ANR project (01/2018 - 06/2021)
- Developments (deprecated)
This is a legacy version of Nephelae code base after the major code refactor of 23/08/2019.
IS NOT TO BE DELETED YET !
- Precidrone
This projects gather the various information and work made in the context of the Precidrone project
- dsaam
Proof of concept of a time management architecture for building a simulation framework on top of a distributed communication middleware. The software is released under the BSD 2-clause license.
See README.md file in the repo for more informations.
- Chariot_cpp
C++ version of the other chariot project
- vtl
Virtual Transport Layer, a protocol deployment management system aiming (1) to dynamically deploy protocol mechanisms/components, in order (2) to ensure optimal data moving between end-points.
- wazabee
WazaBee is an attack allowing to transmit and receive 802.15.4 packets by diverting Bluetooth Low Energy chips.
Also available in: Atom